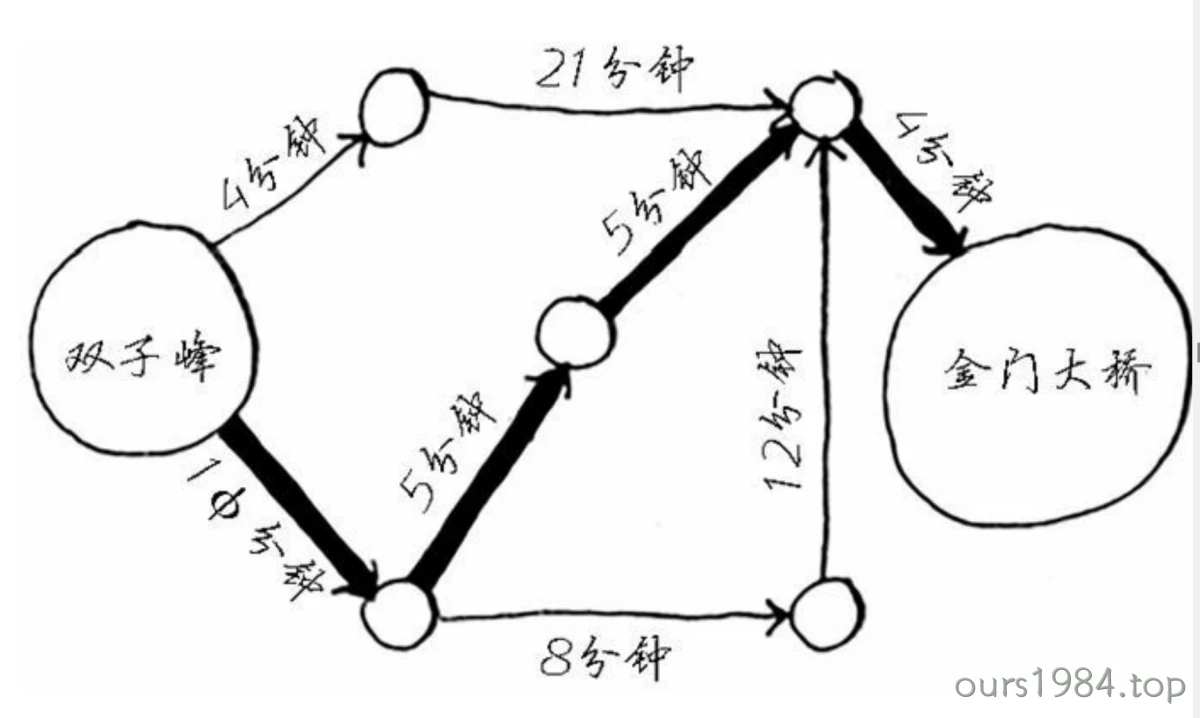
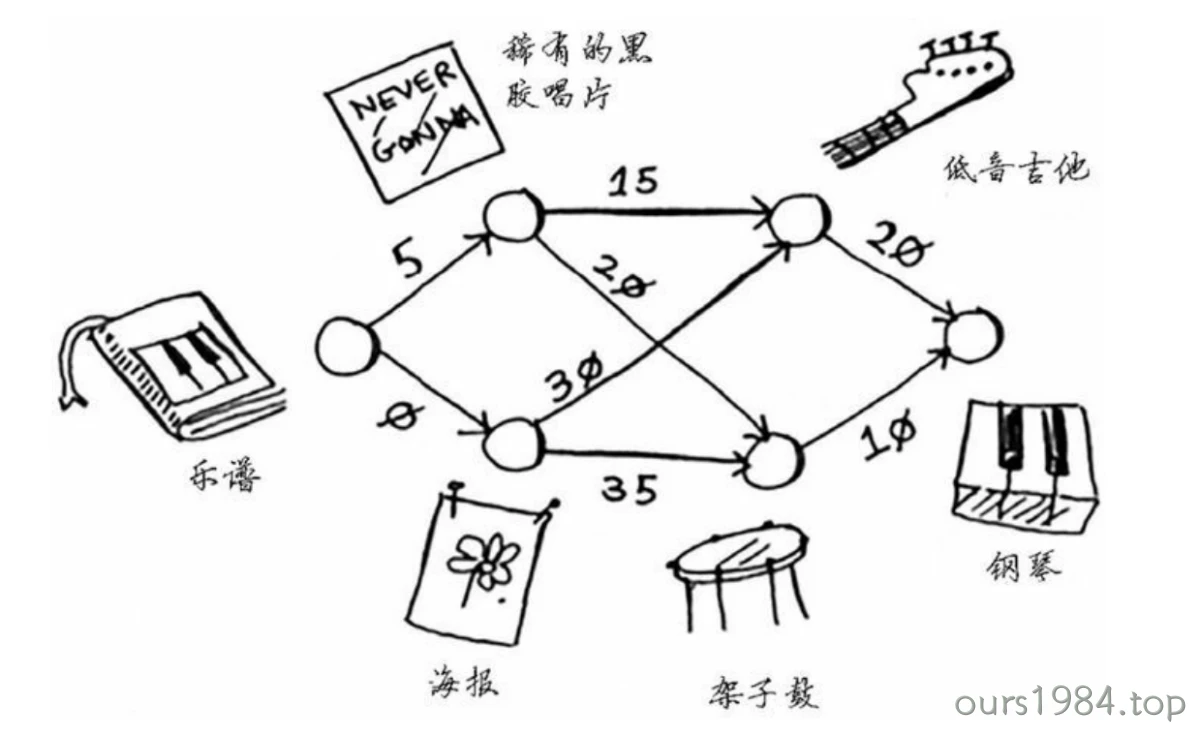
- 加权图——提高或降低某些边的权重
- 图的储存结构--邻接矩阵,邻接表,十字链表
- 最小生成树---prim算法,kruskal算法
- 最短路径--dijkstra算法,floyed算法,bellman-ford算法
加权图
图的储存结构
邻接矩阵
Adjacency
Matrix储存方式是用两个数组来表示图.一个一维数组储存顶点信息,一个二维数组(邻接矩阵)储存图中的边弧信息.
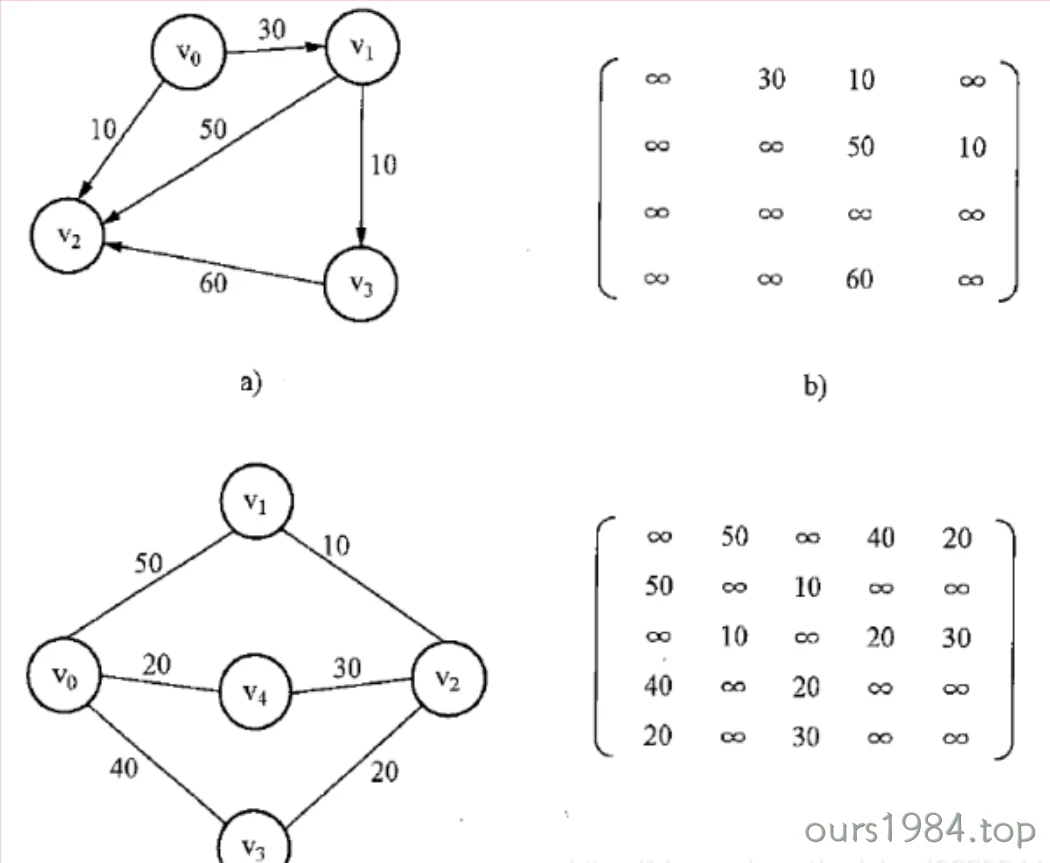
设G=(V,E)是n个顶点的图,则G的邻接矩阵用n阶方阵G表示,若(Vi ,Vj
)或< Vi ,Vj > 属于
E(G),则G[i][j]为边或弧的权Wij,否则Vi与Vj间无边或弧,用 ∞ 表示。
Void CreatGraph(Graph *g){
int i,j,n,e,w;
char ch;
scanf("%d %d",&n,&e);
g->vexnum=n;
g->arcnum=e;
for (i=0;i<g->vexnum;i++){
scanf("%c",&ch);
g->vexs[i]=ch;
};
for (i=0;i<g->vexnum;i++){
for (j=0;j<g->vexnum;j++){
g->arcs[i][j]=MAX_INT
}
};
for (k=0;k<g->arcnum;k++){
scanf("%d %d %d",&i, &j,&w);
g->arcs[i][j]=w;
g->arcs[j][i]=w;
}
}
|
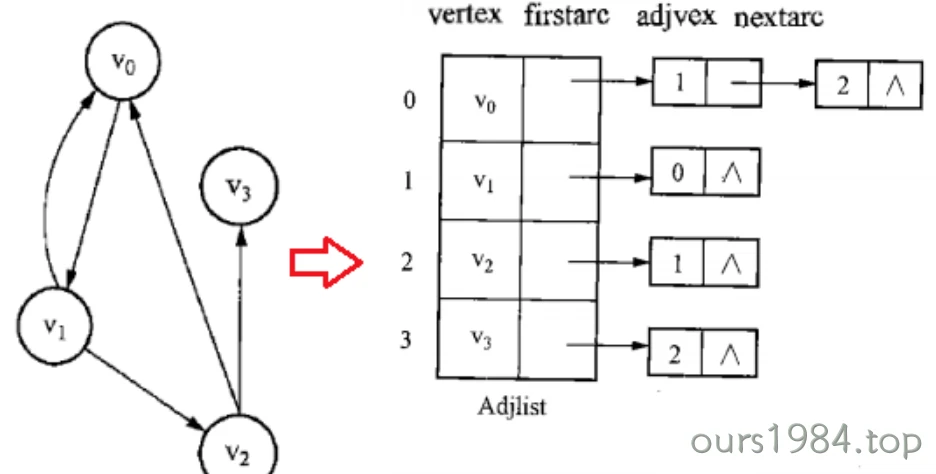
邻接表
考虑到邻接矩阵的空间蓝付费问题,邻接表是顺序存储与链式存储相结合的存储方法。
在邻接表中,对图中每个顶点建立一个单链表,每个单链表中链接图中与顶点相邻接的所有顶点。
邻接表中的每个单链表均有一个表头结点,表头结点均含有两个域 ,一个是
vertex,用于存放当前顶点的信息,另一个是firstarc,用于指向邻接表中的第一个结点。
邻接表中的每个单链表含有不等个数的表结点,表结点含有两或三个域,一个是adjvex,存放与顶点相邻接顶点的序号,另一个是nextarc,指向该顶点的下一个邻接点,带权图表结点的形式还会多一个weight表示权重
(1). n个顶点、e条边的无向图,则其邻接表的表头结点数为n,
链表结点总数为2e;
(2).
对于无向图,第i个链表的结点数为顶点Vi的度;对于有向图,第i个链表的结点数为顶点Vi的出度;
(3). 在边稀疏时,邻接表比邻接矩阵省单元;
(4). 邻接表表示在检测边数方面比邻接矩阵表示效率要高。
十字链表
在有向图的邻接表中,边链表表示了节点的出度,如果要计算入度,则比较麻烦
一般的做法是,同时简历一个逆邻接表,边链表为接待你的入度.需要同时维护两张边表
更通用的做法是十字链表,在变结构中同时储存入点/出点/入边/出边,这样查询就比较方便了
struct EdgeNode
{
int inId;
int outId;
EdgeNode *in=nullptr;
EdgeNode *out=nullptr;
EdgeData data;
};
struct VertexNode
{
VertexData data;
bool init = false;
EdgeNode *firstIn = nullptr;
EdgeNode *firstOut = nullptr;
};
struct graph
{
int numEdges=0;
std::vector<bool> flags;
std::queue<int> queflag;
std::vector<VertexNode> nodes;
}
|
最小生成树
prim算法
普里姆算法查找最小生成树的过程,采用了贪心算法的思想。对于包含 N
个顶点的连通网,普里姆算法每次从连通网中找出一个权值最小的边,这样的操作重复
N-1 次,由 N-1 条权值最小的边组成的生成树就是最小生成树。
那么,如何找出 N-1 条权值最小的边呢?普里姆算法的实现思路是:
- 将连通网中的所有顶点分为两类(假设为 A 类和 B
类)。初始状态下,所有顶点位于 B 类;
- 选择任意一个顶点,将其从 B 类移动到 A 类;
- 从 B 类的所有顶点出发,找出一条连接着 A
类中的某个顶点且权值最小的边,将此边连接着的 A 类中的顶点移动到 B
类;
- 重复执行第 3 步,直至 B 类中的所有顶点全部移动到 A 类,恰好可以找到
N-1 条边。
#include<stdio.h>
#define V 6
typedef enum { false, true } bool;
int min_Key(int key[], bool visited[])
{
int min = 2147483647, min_index;
for (int v = 0; v < V; v++) {
if (visited[v] == false && key[v] < min) {
min = key[v];
min_index = v;
}
}
return min_index;
}
void find_MST(int cost[V][V])
{
int parent[V], key[V];
bool visited[V];
for (int i = 0; i < V; i++) {
key[i] = 2147483647;
visited[i] = false;
parent[i] = -1;
}
key[0] = 0;
parent[0] = -1;
for (int x = 0; x < V - 1; x++)
{
int u = min_Key(key, visited);
visited[u] = true;
for (int v = 0; v < V; v++)
{
if (cost[u][v] != 0 && visited[v] == false && cost[u][v] < key[v])
{
parent[v] = u;
key[v] = cost[u][v];
}
}
}
}
|
由算法代码可知,时间复杂度为\(O(n^2)\)
kruskal算法
将连通网中所有的边按照权值大小做升序排序,从权值最小的边开始选择,只要此边不和已选择的边一起构成环路,就可以选择它组成最小生成树。对于
N 个顶点的连通网,挑选出 N-1
条符合条件的边,这些边组成的生成树就是最小生成树。
假设连通网N = ( V , E ) N=(V,E)N=(V,E),将N
NN中的边按权值从小到大的顺序排列。
- 初始状态为只有n nn个顶点而无边的非连通图T = ( V , { } )
T=(V,{})T=(V,{}),图中每个顶点自成一个连通分量。
- 在E EE中选择权值最小的边,若该边依附的顶点落在T
TT中不同的连通分量上(即不形成回路),则将此边将入到T
TT中,否则舍去此边而选择下一条权值最小的边。
- 重复2,直到T TT中所有的顶点都在同一连通分量上为止。
这个算法的构造过程十分简洁明了,那么为什么这样的构造过程能否形成最小生成树呢?我们来看第二个步骤,因为我们选取的边的顶点是不同的连通分量,且边权值是最小的,所以我们保证加入的边都不使得T
TT有回路,且权值也最小。这样最后当所有的连通分量都相同时,即所有的顶点都在生成树中被连接成功了,我们构造成的树也就是最小生成树了。
#define N 9
#define P 6
struct edge {
int initial;
int end;
int weight;
};
int cmp(const void* a, const void* b) {
return ((struct edge*)a)->weight - ((struct edge*)b)->weight;
}
void kruskal_MinTree(struct edge edges[], struct edge minTree[]) {
int i, initial, end, elem, k;
int assists[P];
int num = 0;
for (i = 0; i < P; i++) {
assists[i] = i;
}
qsort(edges, N, sizeof(edges[0]), cmp);
for (i = 0; i < N; i++) {
initial = edges[i].initial - 1;
end = edges[i].end - 1;
if (assists[initial] != assists[end]) {
minTree[num] = edges[i];
num++;
elem = assists[end];
for (k = 0; k < P; k++) {
if (assists[k] == elem) {
assists[k] = assists[initial];
}
}
if (num == P - 1) {
break;
}
}
}
}
|
Find时间复杂读为\(O(\lg
e)\),外面for循环e次,所以kruskal时间复杂度为\(O(e\lg e)\)
小结
如果你在哪儿卡住了,可以到这里查看源码。